Hobbyking YEP Electronic Speed Controller teardown
An obvious imitation of some of the older YGE ESCs, with a much lower cost and certainly much cheaper components.
TL;DR: Scroll all the way down for schematics.
Use as you wish, no guarantees whatsoever, please at least leave my name on there or provide attribution in another way, thxbye.
The 100A rated one looks like this:

It's a shrink-wrapped sandwich made of two boards, joined by a soldered pin header and an aluminum plate with a silicone pad for thermal conduction.
The 2-layer control board:
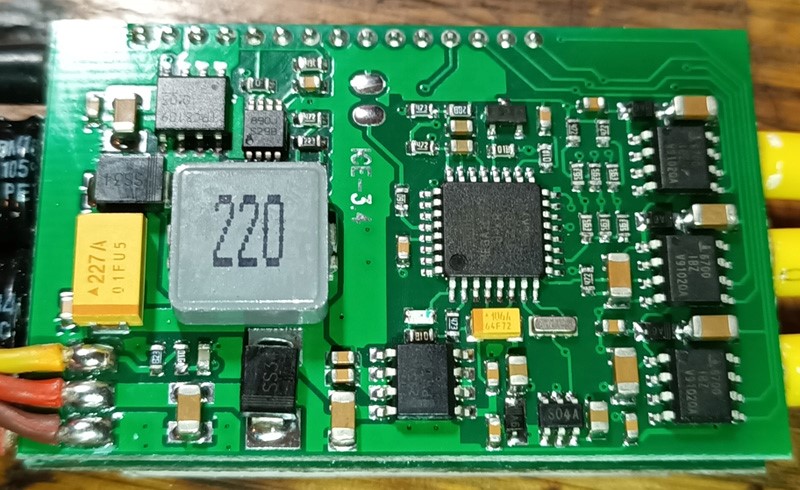
And the 4-layer one for power. Apparently made in July 2019, for anyone who cares:

Twelve more transistors are found on the back side.
Power stuff
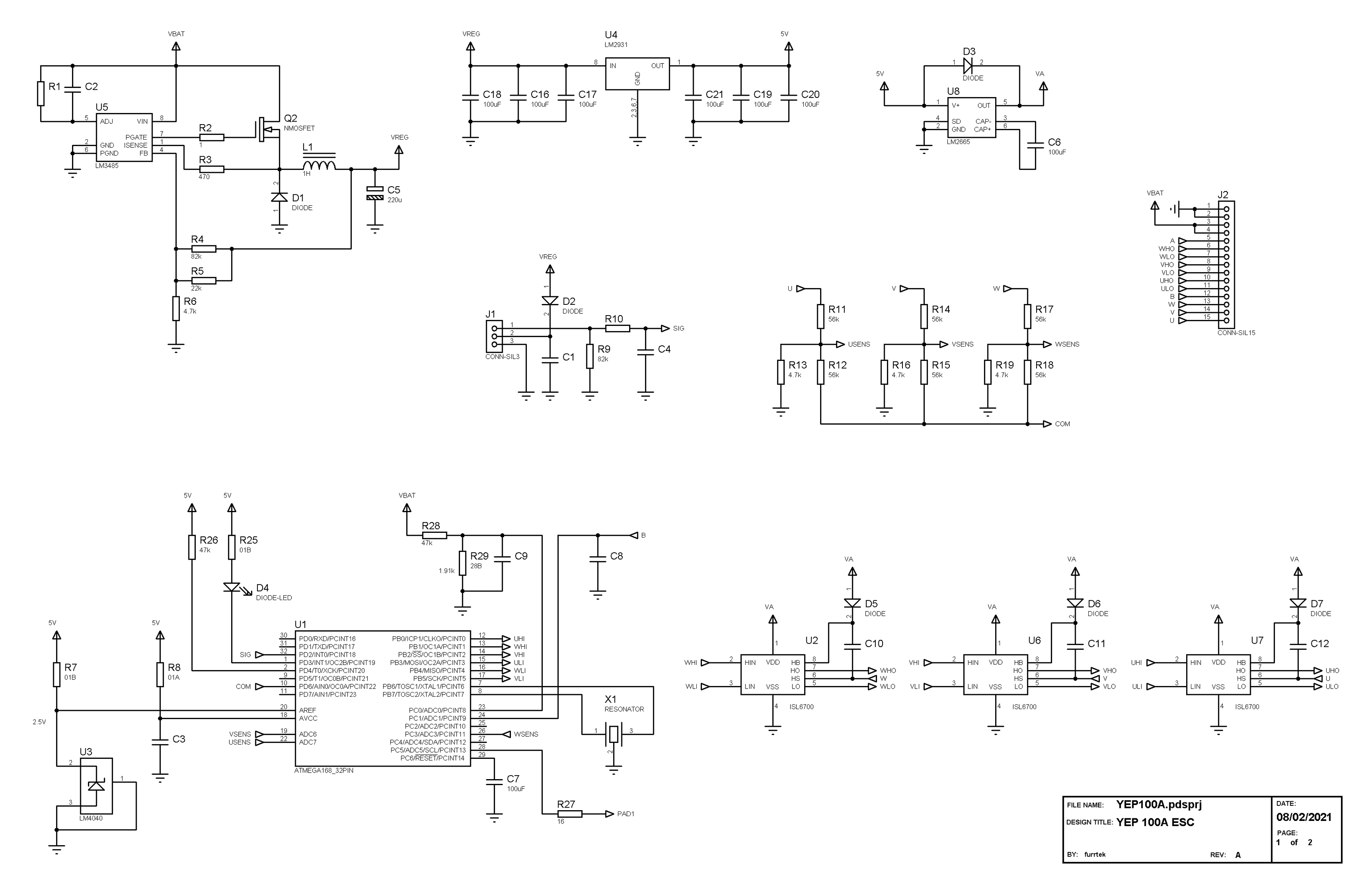
The power supply section is made of a switching buck regulator based on a LM3485, dropping the battery voltage to a steady 6V for the control interface.
The 6V supply is then lowered to 5V for the MCU by a LM2931 low-dropout linear regulator.
The 2.5V MCU ADC reference voltage is provided by an LM4040.
The MOSFET drivers are powered by a tiny LM2665 capacitive voltage doubler, which generates 10V from the 5V supply.
Control stuff
The brain is a very common ATMEGA168PA 8-bit MCU, found in billions of Arduinos and similar low cost prototyping boards.
It is clocked at 16MHz by an external ceramic resonator.
There aren't any programming pads, but soldering points to the required lines are easy to find.
The lockout bits were set on mine, so no reading back of the firmware.
It can however be erased and loaded with a new one.

Four MCU analog inputs are used: one for the battery voltage sensing, and three for the zero-crossing comparators.
The battery voltage is divided by approximately 25.6 (why ?) before reaching the sensing input.
The three comparator inputs are fed by the voltage from the motor winding connections divided by 12.9 (why ?).
The comparator's reference is the midpoint of all windings voltages.
A single pull-up resistor is connected to PD4, which might be a firmware configuration input.
The external speed control signal is weakly pulled down and RC filtered before going in the MCU.
Power stuff
Driving of the power transistors is done by three ISL6700 half-bridges, one for each pair of low and high side transistor groups for each motor winding.
These are "dumb" drivers, they only do voltage switching and basic timing. There's no logic preventing accidental turn on of both low and high side transistors (like in the IR2104 for example).
The power transistors are B02N03R 100A 30V N-channel MOSFETs. Their gates are connected to the drivers via 27 ohm resistors.
Each of the three groups are composed of 5 pairs of transistors, for a total of 30.
Schematics
Unmarked capacitors were not measured, ignore shown values.